Sebelum memasuki inti tutorial mengenai cara kalibrasi drone anda perlu mengetahui apa saja faktor yang membuat drone tidak stabil/crash pada artikel berikut ini karena banyak faktor eksternal penting yang dapat mempengaruhi performa terbang drone selain juga faktor skill pilot itu sendiri pada artikel ini kami akan membahas secara singkat bagaimana kalibrasi drone terdapat beberapa parameter yang perlu di kalibrasi dan setiap drone juga akan memiliki perbedaan dalam prosedur kalibrasi kami hanya akan membahas dua jenis firmware/configurator drone/multicopter yaitu platform betaflight dan mission planner selain itu anda bisa konsultasi secara langsung kepada kami
Cara kalibrasi drone dengan platform mission planner
Kalibrasi Compass
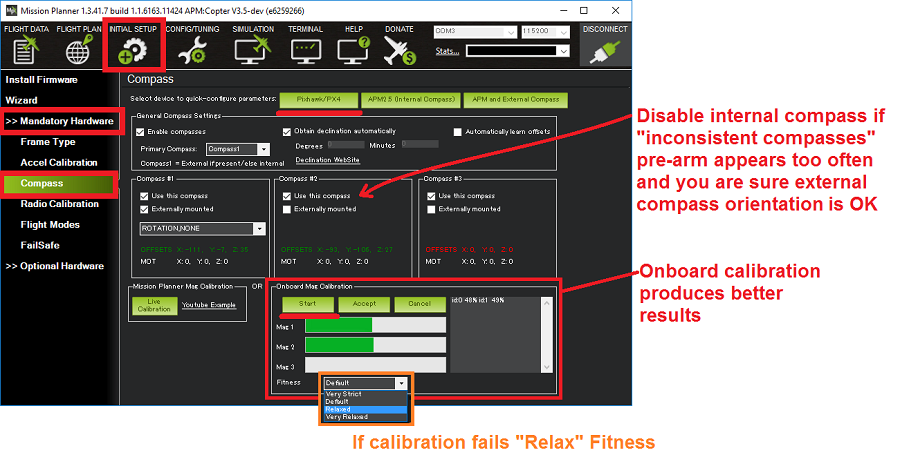
Pertama anda buka aplikasi konfigurator pada tab Initial Setup | Mandatory Hardware pilih sub menu Compass. Pilih konfigurasi flight controller Anda untuk secara otomatis memasukkan informasi konfigurasi paling penting Anda seperti :
Untuk flight controller modern (Pixhawk, NAVIO2, dll) pilih tombol Pixhawk / PX4.
Untuk APM 2.6, pilih APM dengan External compass.
Biasanya Anda tidak perlu mengubah bagian dari “general compass seting” atau specific compass value (mis. “Kompas # 1”), tetapi Anda mungkin ingin mengonfirmasi bahwa kotak Aktifkan kompas dan Dapatkan deklinasi secara otomatis dicentang. Anda mungkin ingin menonaktifkan Kompas # 2 (kompas internal) jika Anda sering melihat pesan pre-arm “kompas tidak konsisten” yang sering ditakuti dan Anda yakin bahwa orientasi kompas eksternal benar.
Kalibrasi Onboard
Copter-3.4 (dan lebih tinggi) mendukung “Onboard Calibration” yang berarti bahwa rutin kalibrasi berjalan pada flight controller . Metode ini lebih akurat daripada “Kalibrasi Offboard” yang lebih lama (alias “Kalibrasi Langsung”) yang berjalan di stasiun bumi karena selain offset, penskalaan juga dihitung.
Untuk melakukan kalibrasi onboard berikut cara nya:
- klik tombol “Onboard Mag Calibration” tombol “Start”
- jika flight controller Anda memiliki buzzer yang terpasang, Anda harus mendengar nada tunggal diikuti dengan bunyi bip pendek sekali per detik
- pegang drone/multicopter anda di udara dan putar sehingga setiap sisi (depan, belakang, kiri, kanan, atas dan bawah) menunjuk ke bawah ke bumi selama beberapa detik secara bergantian sesuai gambar dibawah

- saat drone/multicopter diputar, bar hijau harus memanjang lebih jauh dan lebih jauh ke kanan sampai kalibrasi selesai
- setelah berhasil menyelesaikan tiga nada dari buzzer menaik akan dan window “please reboot autopilot” akan muncul dan Anda perlu me-reboot autopilot sebelum dimungkinkan untuk menyalakan drone.
Tanda jika kalibrasi belum selesai
- Anda akan mendengar nada kegagalan dan bar hijau dapat diatur ulang ke kiri dan rutin kalibrasi dapat dimulai kembali (tergantung pada stasiun ground)
- jika, setelah beberapa upaya, Anda tidak dapat mengkalibrasi kompas, Tekan tombol “Batal” dan ubah tarik-turun “fitness” ke pengaturan yang lebih santai dan coba lagi.
- jika kalibrasi kompas masih gagal, ini dapat membantu menaikkan COMPASS_OFFS_MAX dari 850 ke 2000 atau bahkan 3000
Kalibrasi ESC drone
Jenis kalibrasi ESC yang paling umum untuk pesawat listrik kecil adalah metode max-throttle / min-throttle.
Untuk melakukan kalibrasi jenis ini, Anda harus dapat mengontrol daya ke motor Anda secara terpisah dari daya ke autopilot. Jika Anda tidak memiliki daya yang terpisah, maka Anda dapat sementara menyalakan autopilot Anda dari kabel USB untuk keperluan kalibrasi ini.
Langkah-langkah untuk cara kalibrasi drone :
- mulai dengan autopilot , tetapi dengan motor tidak terhubung ke baterai atau propeller di lepas
- beralih ke mode penerbangan MANUAL
- posisikan stick throttle pada tx Anda ke posisi maksimum
- hubungkan batre
- Pada tahap ini ESC / motor harus berbunyi bip untuk menunjukkan bahwa ia dalam mode kalibrasi ESC. Biasanya ini berupa 2 atau 3 bunyi bip cepat, tetapi motor tidak akan berputar.
- sekarang turunkan throttle stick dengan cepat ke nol
- ESC harus berbunyi bip untuk menunjukkan bahwa ia telah menerima rentang kalibrasi baru
- sekarang pelan-pelan naikkan throttle dan periksa apakah motor merespons dengan benar
Kalibrasi RC

Keselamatan pertama
Untuk alasan keamanan Anda harus mencabut baterai dan / atau melepas baling-baling sebelum membentuk kalibrasi radio.
Trim tengah
Potong tengah dalam mode RC manual sebelum membentuk kalibrasi RC sebelumnya. Jika trim tidak terpusat Anda mungkin perlu melakukan kalibrasi drone bagian RC lagi setelah Anda menggunakan kendaraan (ini mudah dilakukan di lapangan).
Hubungkan autopilot dan hidupkan receiver
Hubungkan autopilot melalui USB dan nyalakan pemancar RC Anda. Pastikan pemancar terikat ke penerima ( penerima menampilkan lampu hijau pekat) dan telah diatur untuk menggunakan model yang benar untuk kendaraan Anda. SETUP AWAL Perencana Misi Terbuka | Perangkat Keras Wajib | Layar Kalibrasi Radio. Jika penerima RC Anda (Rx) dan pemancar (Tx) terikat, Anda akan melihat bilah hijau bergerak ketika Anda memindahkan tongkat pemancar.
Langkah kalibrasi RC
- Buka mission planer bagian INITIAL SETUP | Mandatory Hardware | Radio Calibration
- Klik tombol hijau Calibrate Radio di kanan bawah jendela.
- Mission planner akan menampilkan konfirmasi untuk memeriksa peralatan radio controll,jangan lupa lepas baterai , dan baling-baling . Pilih OK.
- Gerakkan tongkat kontrol dan sakelar pada transmitter ke batas tepi masing-masing dan amati hasilnya di bar kalibrasi radio. Garis merah akan muncul melintasi bilah kalibrasi untuk menunjukkan nilai maksimum dan minimum:
- Anda juga harus mengkalibrasi channel yang telah Anda pilih untuk mengganti mode pada drone, dan channel lain yang telah Anda sambungkan ke autopilot.
- Pilih Klik saat Selesai ketika semua saluran yang diperlukan ditetapkan pada posisi minimum dan maksimum.
- Mission planner akan menampilkan ringkasan data kalibrasi. Nilai normal adalah sekitar 1100 untuk minimum dan 1900 untuk maksimum.
Channel mapping default dapat diubah menggunakan instruksi di RCMAP Input Channel Mapping.
Setelah Anda mengkalibrasi flight mode , Anda dapat menggunakan instruksi dalam Konfigurasi flight Mode RC Transmitter untuk menentukan mode drone mana yang diaktifkan oleh setiap posisi saklar.
Kalibrasi Aceelerometer

- Di bawah Initial Setup | Mandatory Hardware, pilih Accel Calibration dari menu sebelah kiri.
- Klik Calibrate Accel untuk memulai kalibrasi drone.
- Mission planner akan meminta Anda untuk memposisikan drone pada setiap posisi kalibrasi. Tekan sembarang tombol keyboard misal ‘space’ untuk menunjukkan bahwa autopilot dalam posisi dan kemudian lanjutkan ke orientasi berikutnya.

Kalibrasi drone bagian sensor akselerometer wajib jika Anda menggunakan EKF untuk memperkirakan posisi drone. Penting agar drone pada posisi diam segera setelah menekan tombol untuk setiap langkah.
Posisi level adalah yang paling penting untuk mendapatkan yang benar karena ini akan menjadi sikap yang digunakan level controller Anda saat terbang

- Lanjutkan melalui posisi yang diperlukan (tidak perlu menggunakan tombol “Click When Done” pada mission planner).
- Ketika Anda telah menyelesaikan proses kalibrasi, Mission planner akan menampilkan pesan “calibrtion succesful”.
Cara kalibrasi drone dengan platform betaflight
Kalibrasi Accelerometer

Platform android biasa digunakan untuk drone ukuran 3-7inch perkembangan betaflight sendiri sangatlah cepat secara fungsional betaflight mempunyai perbedaan dengan mission panner dalam hal automated flight mode pada betaflight tidak tersedia fitur perencanaan misi jelajah namun meski begitu hardware platform betaflight dapat ditambahkan GPS dan sonar layaknya mission planner betaflight dirancang khusus untuk hobby bukan untuk pekerjaan khusus
Langkah cara kalibrasi drone platform betaflight
- Kalibrasi standard
Perhatikan gambar diatas anda cukup menghubungkan drone anda melalui kabel usb ke laptop dengan configurator betaflight yang sudah di install kemudian posisikan drone anda di atas meja / benda lain dengan permukaan rata sempurna bila perlu gunakan waterpass untuk mengetahui kerataan tempat tersebut jika sudah rata klik tombol calibrate accelerometer pada configurator membutuhkan kurang lebih 5 detik
- Kalibrasi drone dengan RC
Kalibrasi dengan RC hanya perlu dilakukan apabila drone anda tidak stabil pada saat hover meski sudah di kalibrasi dengan cara pertama tanpa input stick rc maka anda perlu menyesuaikanya dengan transmitter

Kalibrasi drone ESC

Pastikan baterai LiPo sudah dilepas dari drone. Sekarang sambungkan flight controller Anda ke Betaflight Configurator. Buka tab “motor” di Configurator, dan aktifkan kotak centang “I understand” di bagian bawah. Pindahkan penggeser utama ke atas, yang akan mengirim sinyal throttle maksimum ke semua motor. Anda sekarang dapat menghubungkan baterai. Ketika ESC menerima sinyal throttle maksimum saat dihidupkan, mereka akan memasuki mode kalibrasi dan motor Anda akan berbunyi bip selama beberapa detik untuk menunjukkan itu.
Saat motor berhenti berbunyi bip, Anda dapat menyeret penggeser utama sampai ke bawah. Ini akan mengirim nilai throttle nol ke ESC, dan motor akan berbunyi bip (nada musik) lagi untuk menunjukkan kalibrasi drone selesai dengan sukses.
Kesimpulan
Cara kalibrasi drone pada artikel ini merupakan cara untuk platform mission planner dan betaflight karena jumlah pengguna kedua platform tersebut sangat banyak sementara untuk platform selain betaflight dan mission planner tidak kami bahas namun anda dapat bertanya / konsultasi secara langsung